Lo scopo principale del rilievo di un oggetto è quello della conoscenza dello stesso per utilizzarlo negli scopi più vari: nel campo ingegneristico, ma nel tecnico in generale, esso si tramuta nella prevenzione di fenomeni naturali, nella stima dei danni del fenomeno stesso o semplicemente nella corretta progettazione di un’opera, inoltre sempre più sono gli utilizzi in campo archeologico, come la realizzazione di modelli tridimensionali di reperti archeologici.
Tra i vari metodi, che vi sono nel rilievo, tutti portano ad un unico risultato: l’individuazione (o la stima) delle corrette coordinate di un punto e quindi la localizzazione di un oggetto.
Questo obiettivo può essere raggiunto attraverso vari metodi:
Rilievo fotogrammetrico con metodologia stereoscopica;
Rilievi topografici con stazione totale;
Rilievo con GPS con i suoi vari metodi: statico, statico-rapido, cinematico, RTK, NRTK ecc…);
Rilievo con Laser Scanner aereo e terrestre (LiDAR);
La fotogrammetria è l’insieme di tutte quelle tecniche e procedure che utilizzano immagini fotografiche di un oggetto per ricavarne le dimensioni. Essa si suddivide in:
Fotogrammetria aerea;
Fotogrammetria terrestre.
Tipo di rilievo
Focalizzando l’aspetto sul rilievo dei punti attraverso il Laser Scanning Terrestre o da pilotaggio remoto (Drone) in generale, esso può dividersi in varie tipologie, in funzione della logistica del sito, morfologia del versante e velocità di acquisizione e quindi precisione.
In particolare la varietà dei campi d’applicazione posso essere:
Aero-fotogrammetria;
Rilievi termografici;
Rilievi termografici in agricoltura;
Controllo delle emissioni di sostanze pericolose;
Perlustrazione e monitoraggio di siti ambientali a rischio, di eventi calamitosi, di aree inagibili, di cantieri e controllo del traffico;
Stato avanzamento dei lavori di cantiere;
Rilievi iper-spettrali o multi-spettrali,
Rilievi GEORADAR.
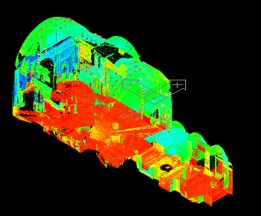
Rilievo Stazione della metropolitana di Mergellina con Scanner Laser HDS 4500 della Leica Geosystems - realizzata da http://www.geofotogrammetrica.it
RILIEVO DA DRONE APR
Il drone, viene utilizzato per rilievi in quota e di vaste aree, attraverso fotocamere georeferite predisposte all’interno dello stesso: il passo di campionamento è discontinuo da cui si può ricavare quello medio.
NUVOLA DI PUNTI
Il risultato del tipo di rilievo sarà una nuvola di punti, cioè un insieme di punti disposti spazialmente a formare l’oggetto rilevato.
Ogni punto dispone di coordinate spaziali, quindi di una collocazione nello spazio, che posso essere locali o assolute e quindi georeferiti.
La nuvola di punti, però può avere all’interno altre informazioni quali:
Valori di colore RGB;
Intensità del segnale riflesso;
Valore di ritorno del segnale;
Normali.
Una caratteristica della nuvola di punti è il passo di campionamento di ogni singolo punto: infatti si può stabilire a priori dell’operazione di rilievo.
Passi di campionamento bassi aumento l’accuratezza del modello ma a sua volta aumentano il peso del file di memorizzazione della stessa:
ASCII (.txt, .asc, .xyz);
LAS/LAZ (.las, .laz);
E57 (.e57);
PTX (.ptx)
Campi di utilizzo della nuvola di punti
Ci sono vari metodi per cui si utilizza la nuvola di punti:
Determinazione di superfici e volumi (per esempio il volume di scavo di una cava);
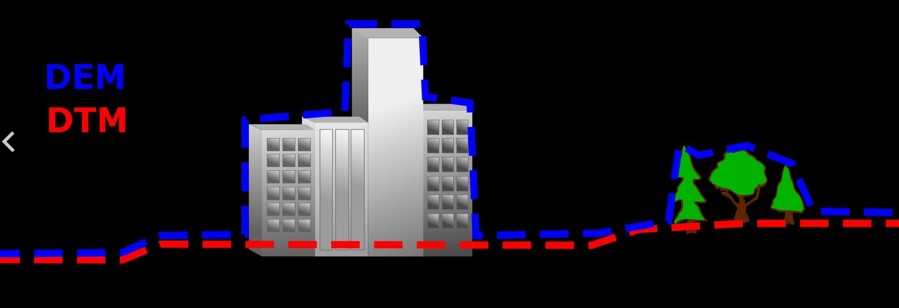
Determinazione del modello digitale del terreno (DTM) dal modello digitale di elevazione (DEM) attraverso opportuni algoritmi in post-processing;
Determinazione di curve di livello o isoipsie;
Creazione di mesh in post-processing e consecutiva texturizzazione della stessa;
Generazione di Ortofoto.
Immagine esplicativa sul modello digitale del terreno (DTM) e modello digitale di elevazione (DEM)
Fasi operative
Piano di volo
La fase preliminare del rilievo è composta dalla progettazione vera e propria del volo aereo, definendo:
Scala, tipo e finalità della carta finale;
Morfologia del terreno;
Dimensione (estensione) del rilievo;
Aereo (tipo autonomia, velocità, ecc…);
Modalità di appoggio di fotogrammi al terreno (Triangolazione aerea – TA, GPS, ecc…);
Camera da presa;
Dispositivi ausiliari.
In particolare occorre parametrizzare questa fase, attraverso l’attribuzione di valori quali:
Il tipo di camera utilizzata;
La scala media del fotogramma e la quota di volo;
L’Overlap (Ricoprimento laterale del fotogramma) ed il Sidelap (Ricoprimento trasversale del fotogramma);
Le direzioni principali e secondarie delle strisciate;
Il numero di fotogrammi;
La velocità dell’aereo e intervalli di scatto;
L’epoca del volo.
Fasi svolte in sito
La fase successiva è quella di “installare” in sito dei target riconoscibili e ben visibili.
Campagna di rilievo GPS
Attraverso l’utilizzo, infine, di un metodo di rilievo di coordinate come un GPS, si ricavano le coordinate di punti “singolari” e facilmente riconoscibili dall’alto e dei stessi target, così da georeferire le immagini.
Utile a questo proposito la redazione di monografie descrittive di ogni singolo punto rilevato, così da evitare confusione con punto simili.
Le immagini risultano già georeferite, secondo il sistema di riferimento WGS84.
LASER SCANNER TERRESTRE
I laser scanner terrestri effettuano una misurazione diretta dell’oggetto, cioè utilizzano la tecnologia in loro possesso per acquisire informazioni spaziali, metriche e qualitative dei punti che riesce a vedere (determinazione della posizione spaziale dell’oggetto in base al tempo che impiega un determinato impulso laser a ritornare allo strumento): il passo di campionamento è regolare.
Il laser scanner terrestre vie posizionato in sito in più punti, con angolazioni diverse (da progettare prima) in modo tale da poter coprire tutti, anche quelli meno visibili e più nascosti.
LIDAR Scanner pronto per il rilievo
Attraverso l’utilizzo di sistemi GPS e di una stazione totale, vengono collimati tutti i target predisposti nella zona, dandogli delle coordinate locali, dopodiché passeranno in assolute con l’utilizzo di due o più punti rilevati con un sistema GPS.
POST PROCESSING
Una volta ottenuti i dati del rilievo, ovvero la nuvola di punti, attraverso software dedicati i punti vengono processati e quelli omologhi vengono individuati attraverso opportuni algoritmi, così la nuvola è allineata.
Si ricorda che in questa fase sono molteplici le operazioni che si possono effettuare, come per esempio:
Semplificazione della nuvola, così da rendere la mole di dati più gestibile e leggera;
Pulitura della nuvola di quei punti chiamati outliers, cioè quei punti che o per un errore dell’operatore, per qualche fenomeno atmosferico, di riflessione o rifrazione risulta in posizione completamente discordante dall’insieme nella nuvola.
Creazione di mesh;
Creazione di texture e relativa texturizzazione della mesh;
Generazione delle normali alle superfici dei triangoli della mesh;
Creazione del DTM, attraverso una prima classificazione del terreno automatica grazie agli algoritmi dei software presenti in commercio, e una successiva classificazione dei punti ground – non ground manuale;
Ortorettifica delle immagini attraverso gli algoritmi dei software;
Creazione di profili e sezioni ed esportazione delle stesse.
Un utile strumento che può aiutare nel post processing e quindi nell’elaborazione dei dati raccolti e’ il software Trispace della GeoSTRUper la realizzazione di piani quotati piani a curve di livello, vettori di pendenza, tracciamento di sezioni sia trasversali che lungo assi stabiliti, calcolo di volumi rispetto a piani assegnati.
Effettua inoltre la restituzione tridimensionale del rilievo.




0 risposte su "Il rilievo - Tipologie ed usi"